このプロジェクトは、強化学習ロボットの開発を目標とすると同時にその開発を通じて、
信州諏訪地域など地域産業の活性化や、新しい産業の創出も目指しています。
This page is written in Japanese.
To the English version of this page.
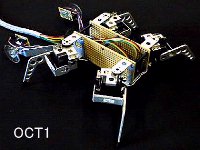
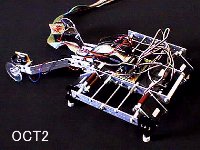
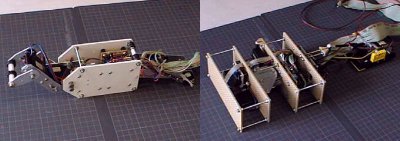
Fig.A,B: 学習対象としたロボット機構のその模式図. Aはボディから2節リンクアームが張り出す構造を持ち,Bはボディにねじりと曲 げを行う構造を持つ. AとBはメカニズム的に全く異なるが,完全に同じ学習アルゴリズム を適用可能.
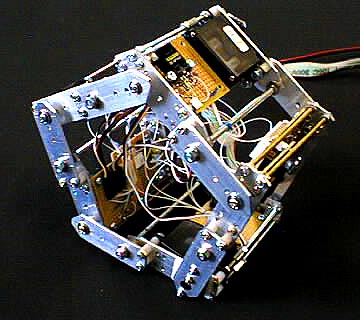
画像に示すように5つのリンクを環状につないだ構造のロボットで,2箇所の関節のみをモーターで駆動して 形を変える。転がって進むような制御規則を強化学習により試行錯誤を通じて獲得する。 左右非対称な構造のため,ハンドコーディングによるプログラミングは難しい。
5リンク環状ロボットの詳細な説明ページへ
質問やコメント等はメールにてどうぞ:

To the English version of this page.
強化学習の適用例:ロボットの移動動作獲得
ここで示す例は,強化学習が持つ以下の2つの特徴について示すことを意図している。- 強化学習による制御プログラミングの自動化・省力化
- ハンドコーディングよりも優れた解の獲得, 特に不確実性(摩擦やガタ,振動,誤差など)や 計測が困難な未知パラメータが多い場合,人間の常識では対処し切れないことが 予想され,強化学習の効果が期待できる.
8自由度4脚ロボット (2002.03.07)
8自由度4脚ロボットの詳細な説明ページへ
強化学習によってまっすぐ前進する制御規則を試行錯誤によって獲得する。2自由度ロボット
Fig.A,B: 学習対象としたロボット機構のその模式図. Aはボディから2節リンクアームが張り出す構造を持ち,Bはボディにねじりと曲 げを行う構造を持つ. AとBはメカニズム的に全く異なるが,完全に同じ学習アルゴリズム を適用可能.
2自由度ロボットの詳細な説明ページへ
強化学習によって前進する制御規則を試行錯誤によって獲得する。5リンク環状ロボット
画像に示すように5つのリンクを環状につないだ構造のロボットで,2箇所の関節のみをモーターで駆動して 形を変える。転がって進むような制御規則を強化学習により試行錯誤を通じて獲得する。 左右非対称な構造のため,ハンドコーディングによるプログラミングは難しい。
5リンク環状ロボットの詳細な説明ページへ
質問やコメント等はメールにてどうぞ:
Copyright(c) 2005.STUDIOUS. All Rights Reserved.