このプロジェクトは、強化学習ロボットの開発を目標とすると同時にその開発を通じて、
信州諏訪地域など地域産業の活性化や、新しい産業の創出も目指しています。
「スタディアス」プロジェクト
新エネルギー・産業技術総合開発機構(NEDO)21世紀ロボットチャレンジプログラム「次世代ロボット実用化プロジェクト」実用システム化推進事業②プロトタイプ開発支援事業
研究開発テーマ「強化学習型(動作制御自己開発型)6脚歩行ロボットの研究開発」
提案者名: 岡谷商工会議所
研究開発責任者:木村 元(九州大学)
研究分担(ソフト開発)
- 九州大 助教授 木村元
- 東工大 教授 出口弘(総合理工学研究科,知能システム科学専攻)
- 京都大 教授 喜多 一(学術情報メディアセンター)
研究分担(本体開発)
- インダストリーネットワーク株式会社
- (有)スマートセンサーテクノロジー
- 有限会社ケルビム
- (有)コジマ工業
- 長野高専 教授 山崎保範
- (株)ダイヤ精機製作所
- (株)世界最速試作センター
自身で行動を獲得するロボット
未知の環境でも働くロボット開発へ
人間の行動獲得能力を人工物として実現九州大学と信州諏訪の中小企業が連携
強化学習ロボットは当初このようなイメージとして企画が提案された(岡谷商工会議所提供)。
愛・地球博の「NEDOプロトタイプロボット展」のパンフレットにはこのイメージ画像で掲載されたため、 「このロボットはどこで展示しているの?」とのご質問をいただくことが多かった。 技術上の諸事情により、完成したロボットはこのイメージとはだいぶ離れてしまった。(下の写真)
ロボットの概要
本機は、例えば生まれたての人間はハイハイ もできないが経験を重ねると立って歩けるよ うになるような「経験を積んで動作を獲得す る」という適応的学習(強化学習)の研究用 に製作された。ロボットが仕事を達成したら 「報酬」と呼ばれる信号を与えるようにして おくと、ロボットは報酬をより多く得る動き 方を試行錯誤により見つけ出す。本機は歩き 方を学習するだけだが、そこに用いられてい る強化学習は、歩く以外にも様々な事に応用 可能な新技術である。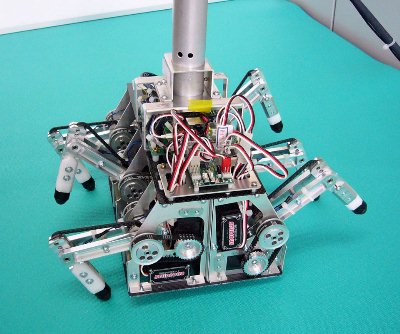

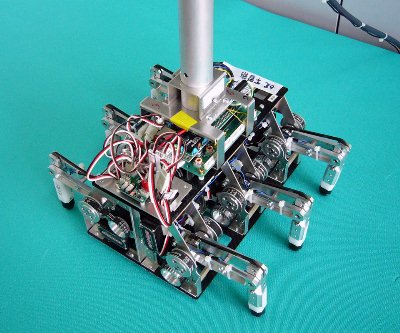
愛・地球博でのデモンストレーションの様子(モリゾー・キッコロメッセ2005年6月14日)
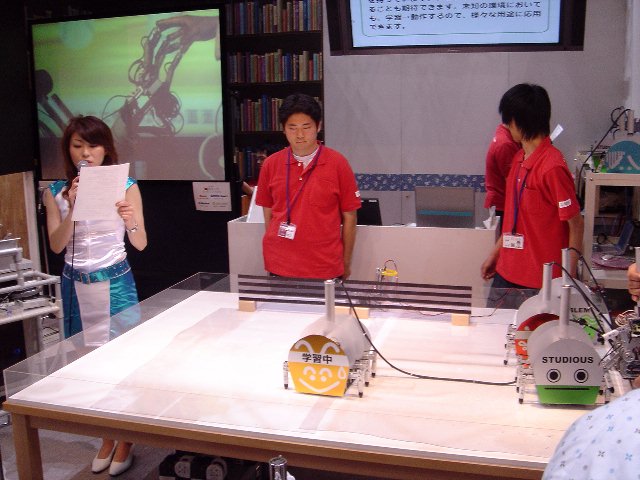
デモンストレーションにあたっては諏訪東京理科大学 システム工学部 機械システムデザイン工学科の市川純章先生および同研究室の学生の皆さんにご協力いただきました。
その他特徴
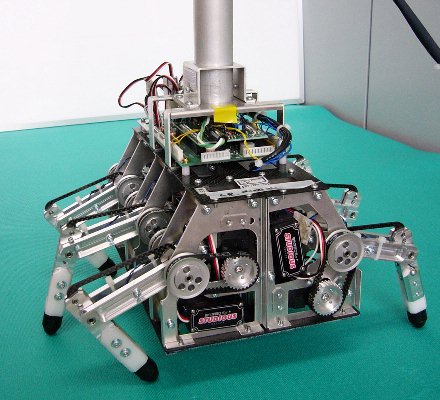
各足先にタッチセンサ、底面には移動距離と方向を計測するセンサ(報酬用)を装備ロボットはLANに接続され、ネットワークを介してコントロールされる。
強化学習による歩行動作の自動獲得機能によって、 ロボットの足が数本使えない状況でも 適切な歩行動作を自動的に獲得できる。
謝辞
ロボットの製作および万博・愛地球博のプロトタイプロボット展への展示に際しては、 諏訪東京理科大学 システム工学部機械システムデザイン工学科の市川純章先生および 同研究室の学生の皆様、インダストリーネットワーク株式会社の 大橋社長や宮本さんには大変お世話になりました。ここに御礼申し上げます。スマートセンサーテクノロジーの御子柴さんと 国立長野高専電子制御工学科の山崎保範教授には、回路基板の設計で大変お世話になりました。
岡谷商工会議所の井出さんと杉本さんには、様々な事務手続きでお世話になりました。
コジマ工業有限会社の小島社長にはロボットの板金加工にてお世話になりました。
有限会社ケルビム の堀内さんや宮本さんにはロボット のデザインにおいて大変お世話になりました。
京都大学 学術情報メディアセンターの喜多一 教授、 および東京工業大学大学院総合理工学研究科知能システム科学専攻の出口教授には、様々なサポートを していただきました。ありがとうございました。
このほか、多くの方々のご支援により無事デモ展示を行うことができました。 皆様には厚く御礼申し上げます。
万博会場にお越しいただいたお客様からも、大変有用なコメントを多数いただきました。 ここに御礼申し上げます。
備考
本ロボットはNHKのテレビ放送において(少しだけ)紹介された。- NHK総合 万博・愛地球博 ロボット特集
- 放送日: 2005年6月10日 20時から 43分生放送
- 番組内容: 6月9~19日の期間、愛・地球博では「プロトタイプロボット展」が開催される。 番組では開催2日目の6月10日・20時・万博会場から生中継で最先端ロボットたちを紹介する。
- 制作会社: オルタスジャパン
- 協力内容:5月27日 九州大学にてスタディアスの撮影取材
- 撮影内容:
- スタディアスが行うプロトタイプ展でのデモ内容
例えば)何も動かない状態から歩き出すまでの様子 - 学習アルゴリズムを映像で説明
- スタディアス開発までの歴史
- スタディアスの形、6足で虫のような形の理由
- スタディアスの知、学習アルゴリズムが実際に行われている場所(ロボット内の配線や基板など)
- スタディアスが行うプロトタイプ展でのデモ内容
Copyright(c) 2005.STUDIOUS. All Rights Reserved.